คู่มือแกะกล่องและประกอบเครื่อง Bambu Lab A2L
คู่มือแกะกล่องและประกอบเครื่อง Bambu Lab A2L
บทความนี้อธิบายขั้นตอนการแกะกล่อง ประกอบตัวเครื่อง เปิดเครื่อง และทำ Initial Calibration สำหรับ Bambu Lab A2L โดยเรียงลำดับตามงานจริงตั้งแต่เปิดกล่องจนพร้อมเริ่มตั้งค่าเครื่องครั้งแรก เหมาะสำหรับลูกค้าที่เพิ่งได้รับเครื่องและต้องการลดความเสี่ยงจากการยกหรือประกอบผิดตำแหน่ง
| หัวข้อ | รายละเอียด |
|---|---|
| รุ่นเครื่อง | Bambu Lab A2L |
| ระดับงาน | การแกะกล่องและประกอบครั้งแรก |
| เครื่องมือที่ใช้ | อุปกรณ์และประแจที่มากับเครื่อง |
| สิ่งที่ควรตรวจเป็นพิเศษ | การจับ Frame, การจัดสาย Integrated Cable, การขันน็อต Base Housing, การหล่อลื่นแกน Y และการติดตั้ง Purge Wiper |
ข้อควรระวัง: ก่อนเริ่มงาน ควรอ่าน Quick Guide ที่มากับเครื่องให้ครบ จัดพื้นที่โต๊ะให้มั่นคง และควรมีพื้นที่วาง Frame กับ Base Housing แยกกันชั่วคราว เพื่อป้องกันการกระแทกหรือดึงสายโดยไม่ตั้งใจ
ตรวจอุปกรณ์ภายในกล่อง
ก่อนนำชิ้นส่วนออกจากกล่อง ให้ตรวจภาพรวมอุปกรณ์และตำแหน่งการจัดวางในกล่องก่อนหนึ่งรอบ การทำความเข้าใจก่อนยกจริงจะช่วยลดโอกาสจับผิดจุด โดยเฉพาะชิ้นส่วน Frame และ Base Housing ที่มีสายและจุดเชื่อมต่ออยู่ภายใน

ขั้นตอนที่ 1: เปิดกล่องและเตรียมพื้นที่
ตัดเปิดกล่องด้านนอก จากนั้นฉีกถุงกันความชื้นออก แล้ววางถุงกันความชื้นคลุมบนกล่องด้านนอกเพื่อใช้เป็นพื้นรองชั่วคราวสำหรับวางชิ้นส่วนที่นำออกมา

อ่าน Quick Guide และข้อควรระวังให้เข้าใจก่อน โดยเฉพาะจุดที่ห้ามจับหรือห้ามดึงระหว่างยกชิ้นส่วนออกจากกล่อง

ขั้นตอนที่ 2: นำอุปกรณ์เสริมและชิ้นส่วนหลักออกจากกล่อง
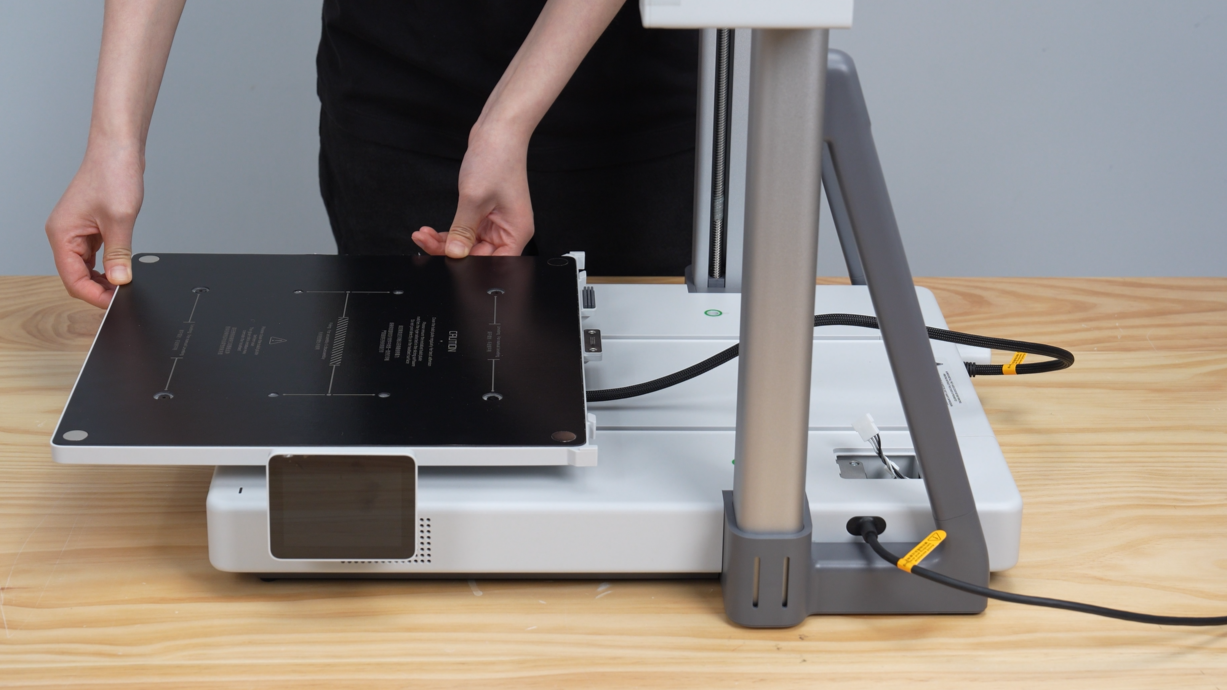
นำ Build Plate ออกก่อน แล้ววางไว้ในพื้นที่สะอาดเพื่อป้องกันผิวแผ่นพิมพ์เป็นรอย

นำโฟมด้านบนพร้อมอุปกรณ์ภายในออก ซึ่งโดยทั่วไปจะมี accessory box, Purge Wiper และ Spool Holder

นำโฟมด้านบนอีกชิ้นออก เพื่อเปิดพื้นที่ให้เข้าถึง Frame และส่วนฐานเครื่อง

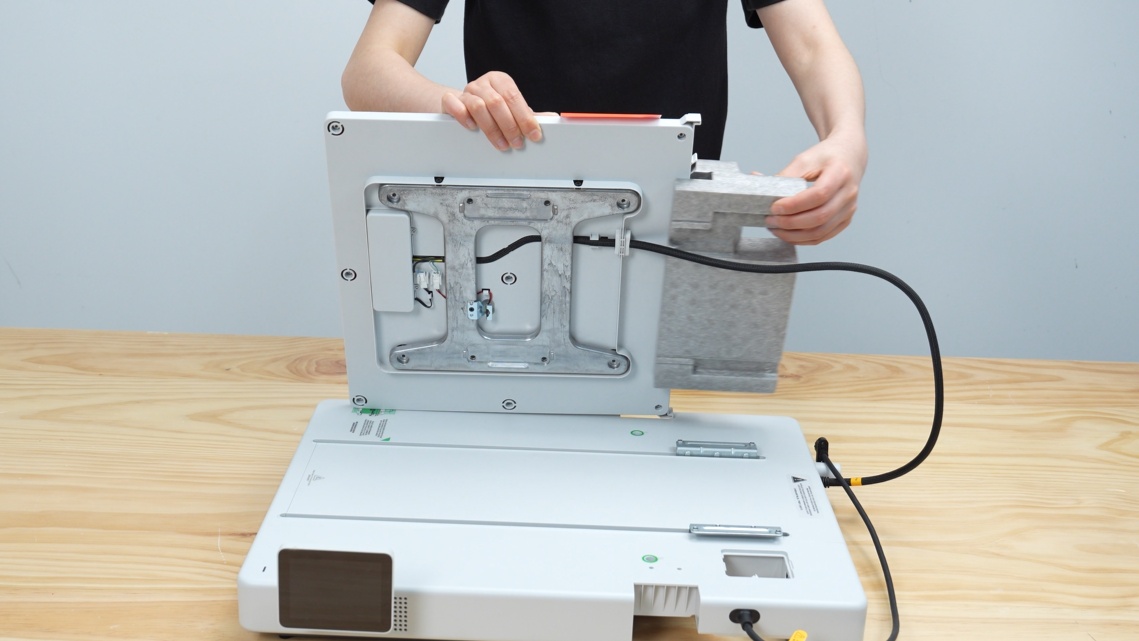
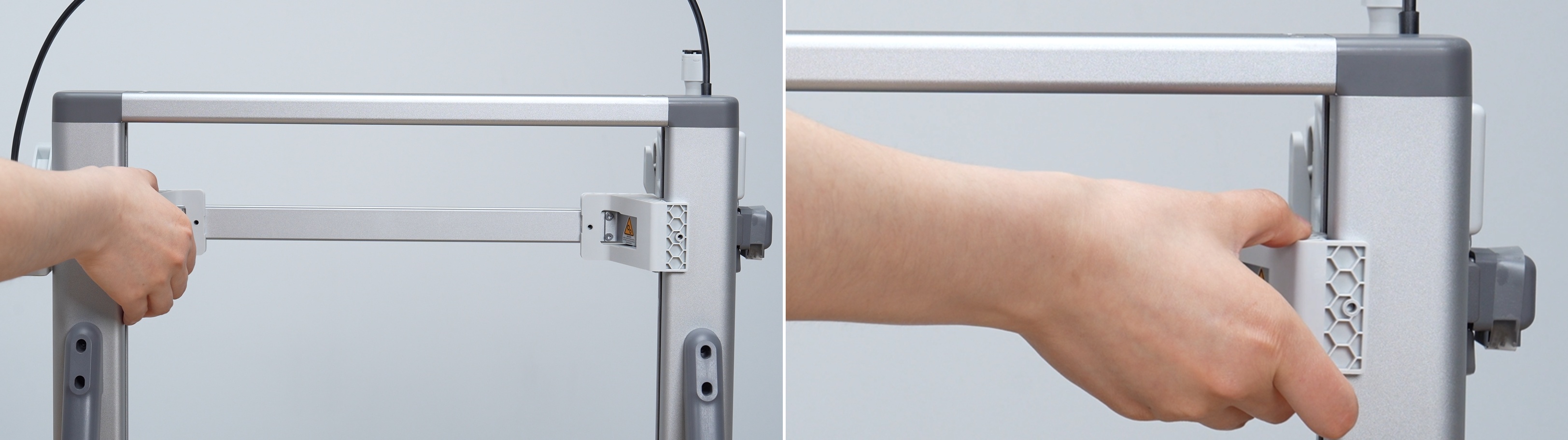
นำ Toolhead Cable ออก จากนั้นจับบริเวณสีเทาเข้มหรือจับบริเวณแกน Z ทั้งสองข้างเพื่อยก Frame ออก แล้วตั้ง Frame ในแนวตั้งบนพื้นผิวที่มั่นคง
ข้อควรระวัง: ห้ามจับแกน X ของ Frame เพื่อยกเครื่อง ให้จับแกน Z ทั้งสองข้างหรือบริเวณสีเทาเข้มด้านหลังแกน Z แทน เพื่อไม่ให้แกนและชุดหัวพิมพ์รับแรงผิดทิศทาง
นำแผ่นกระดาษออก แล้วจับ Base Housing จากสองด้านเพื่อยกออกจากกล่อง วางบนพื้นผิวที่มั่นคง
ข้อควรระวัง: ห้ามดึง Base Housing ด้วย cable tie เพราะ cable tie ไม่ได้ออกแบบมาให้รับน้ำหนักชิ้นส่วน

นำท่อ PTFE และตัวอย่างเส้น Filament ออกจากกล่องและเก็บไว้ใกล้พื้นที่ประกอบ

ขั้นตอนที่ 3: ถอดวัสดุกันกระแทกของ Base Housing
นำ Power Cable ออกจากโฟมของ Base Housing
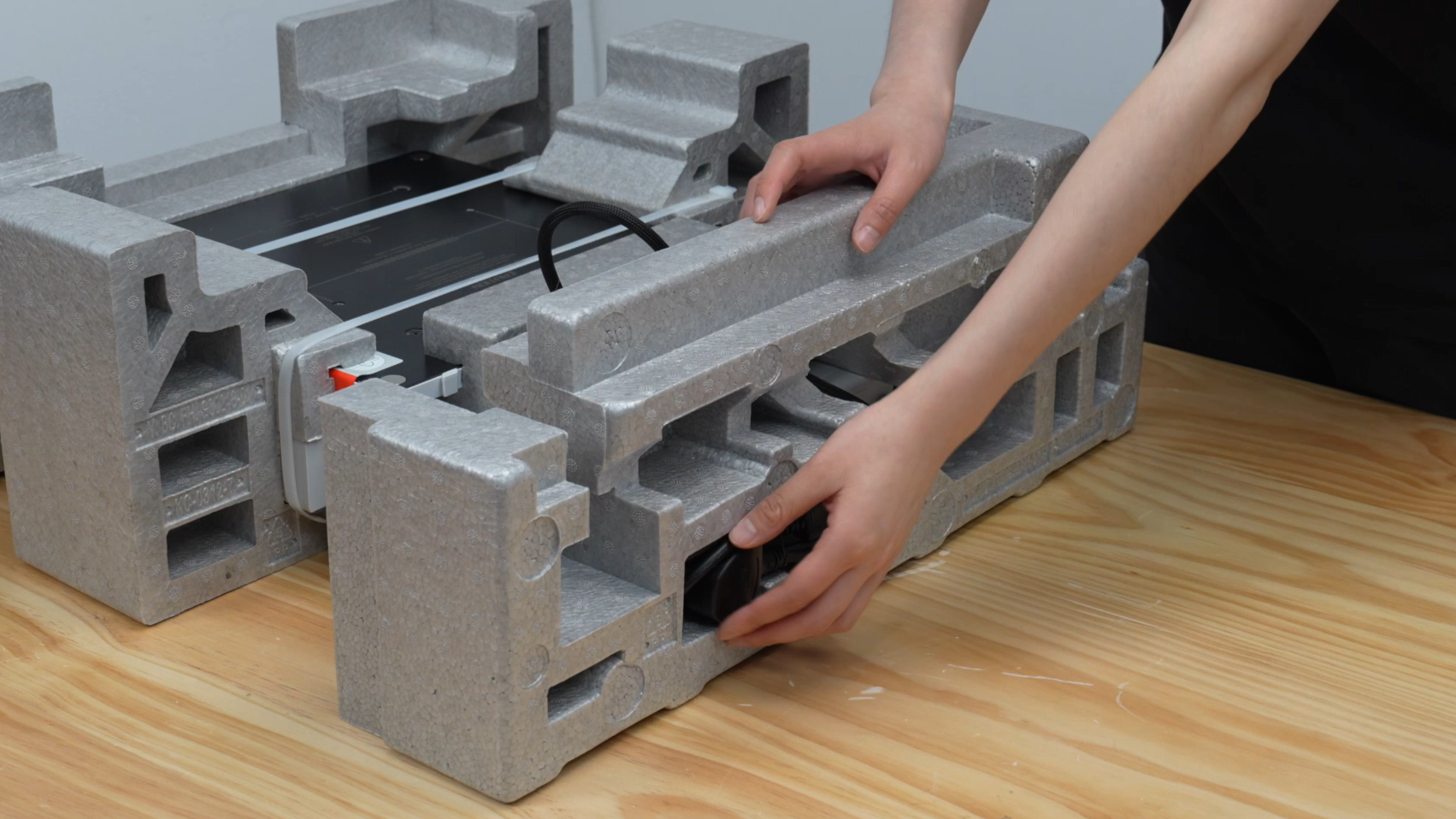
ตัด cable tie แล้วถอดโฟมด้านซ้ายและขวาของ Base Housing ออก
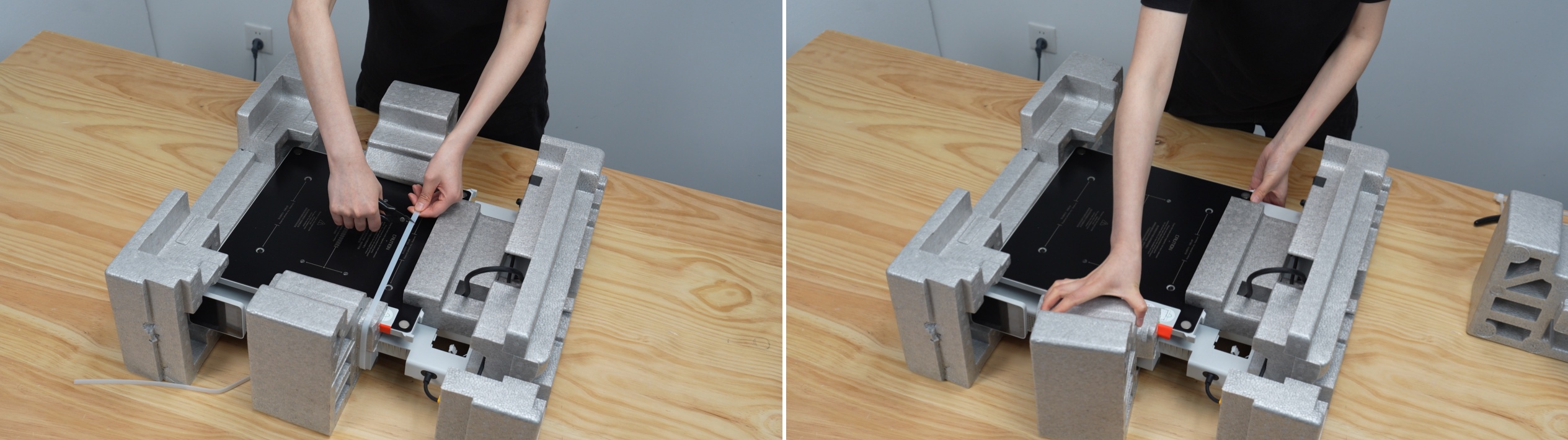
แกะเทปและนำ Integrated Cable ออกมาเตรียมไว้ อย่าบิดสายหรือพับสายแรง

ใช้มือประคอง Base Housing แล้วถอดโฟมด้านหน้าและด้านหลังออก
ใช้มือประคอง Heatbed แล้วถอดโฟมด้านหลัง Heatbed ออก
ขั้นตอนที่ 4: ยึด Heatbed เข้ากับ Y-carriage
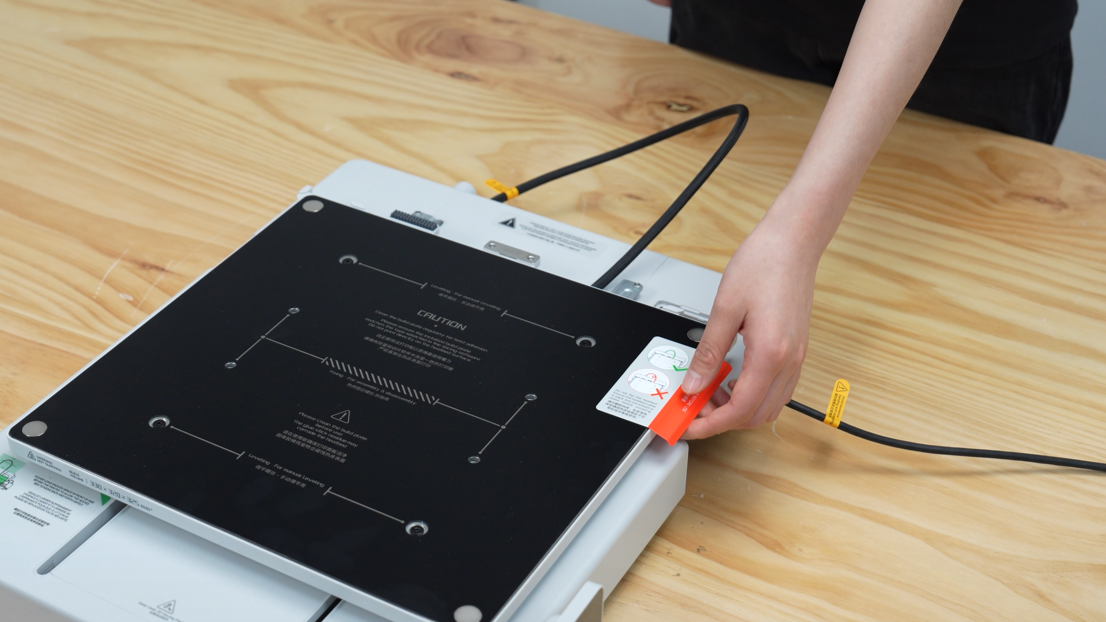
อ่านป้ายเตือนบน Heatbed ให้ครบ ตรวจให้แน่ใจว่า Heatbed Cable ไม่บิด จากนั้นจึงลอกป้ายออก
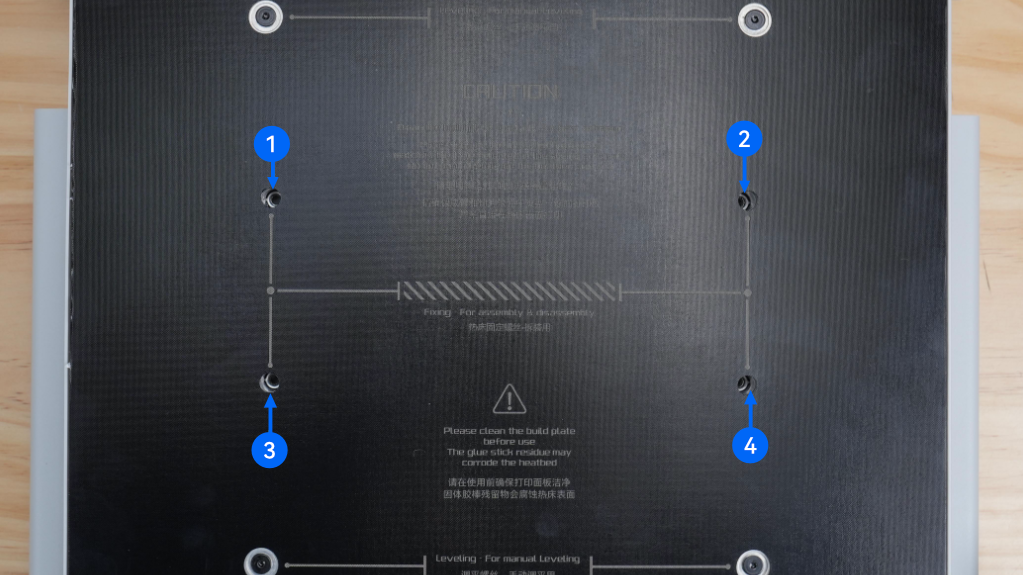
จัดรูน็อตของ Heatbed ให้ตรงกับ Y-carriage แล้ววางลงในตำแหน่งให้จบในครั้งเดียว

นำ Screws for Heatbed จาก accessory box ออกมา แล้วขันน็อตยึด Heatbed ทั้ง 4 จุดให้แน่น
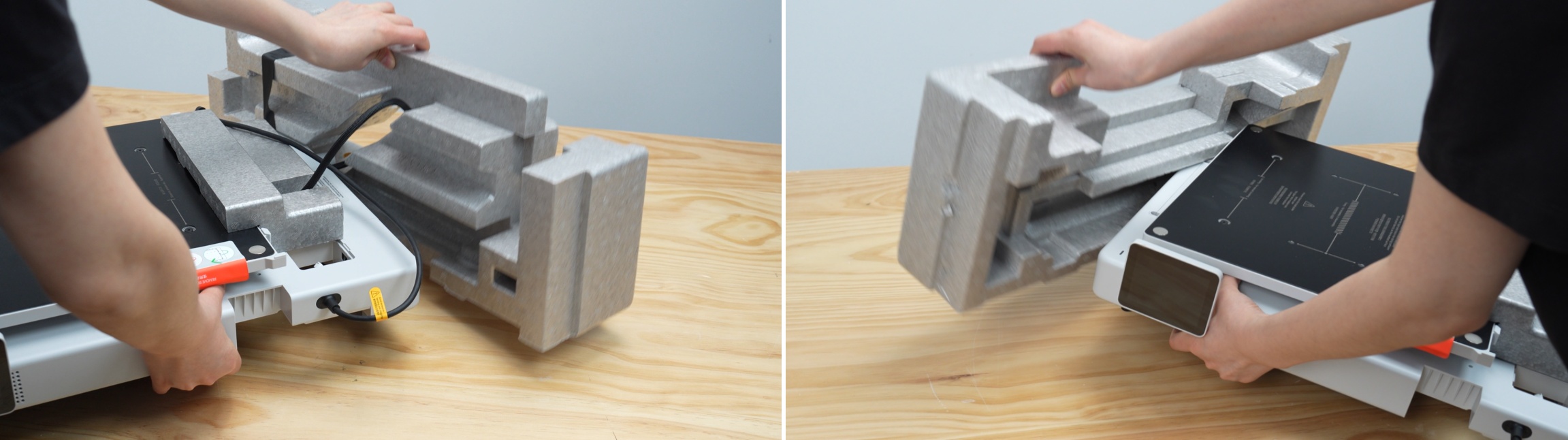
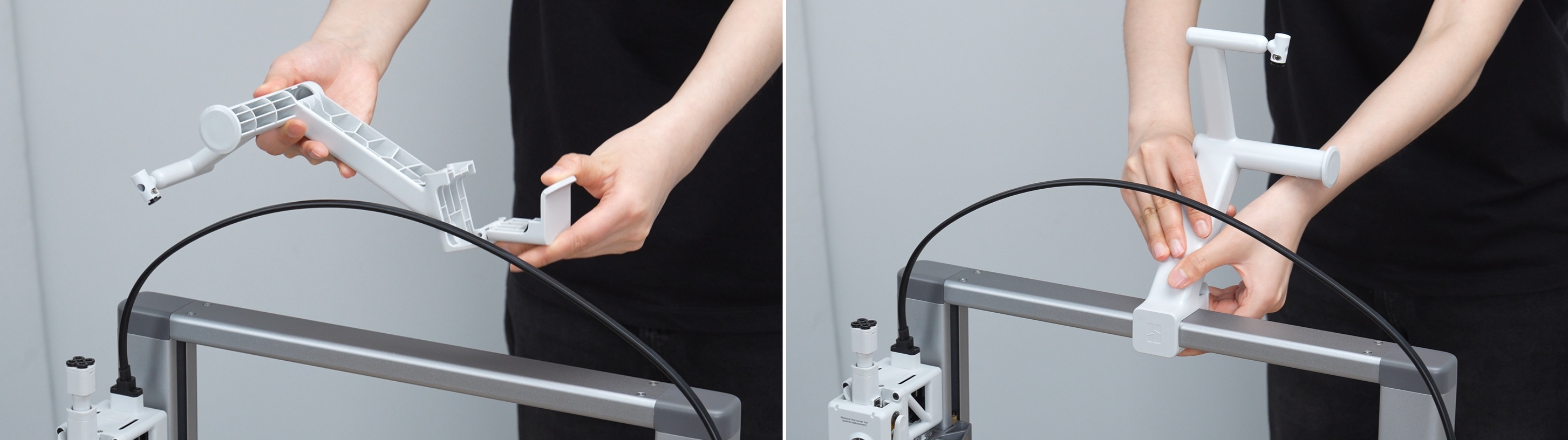
ขั้นตอนที่ 5: ประกอบ Base Housing เข้ากับ Frame
ดึงสาย Z Motor ขึ้น และใช้มือประคอง Integrated Cable เพื่อไม่ให้สายถูกหนีบระหว่างประกอบ
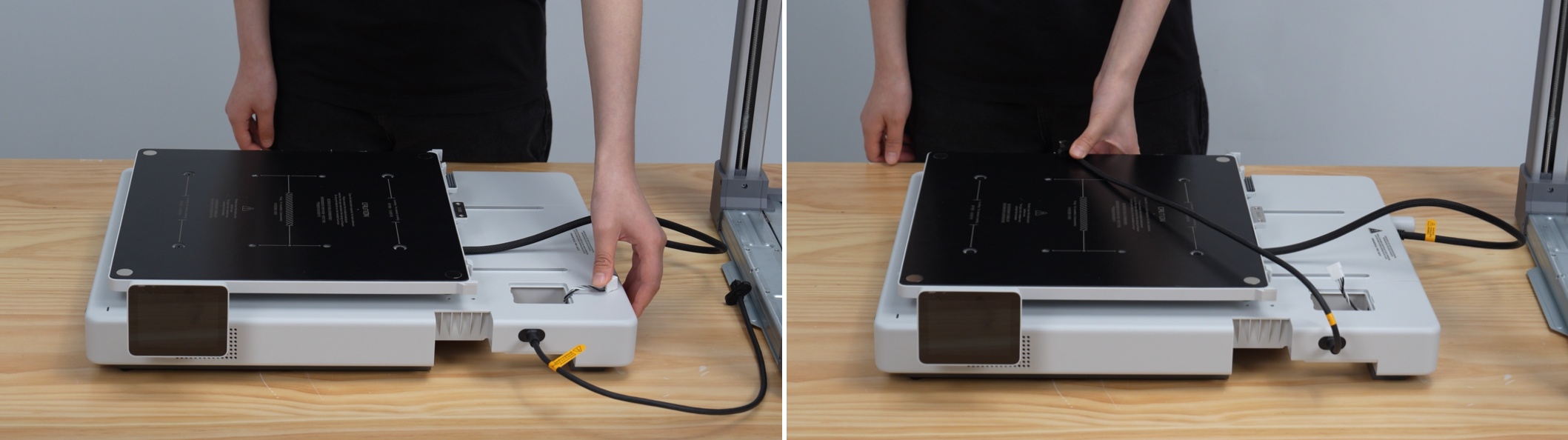
เอียง Base Housing ประมาณ 45 องศาตามภาพ ให้ผ่านช่องของ Frame โดยจัดตำแหน่งจุดเชื่อมต่อ Integrated Cable ให้อยู่บริเวณช่องสามเหลี่ยมของ Frame

เมื่อร่องของ Base Housing ตรงกับ Frame แล้ว ค่อย ๆ ลด Base Housing ลงจนแนบสนิทกับ Frame

ลอด Integrated Cable ผ่านช่องสามเหลี่ยมของ Frame แล้ววางสายไว้ด้านข้างอย่างเรียบร้อย

ขั้นตอนที่ 6: ถอด Y-Axis Top Cover
ดัน Heatbed ไปด้านหน้าสุดเพื่อเปิดพื้นที่ทำงานบริเวณฝาครอบแกน Y
ยกด้านท้ายของ Y-Axis Top Cover ขึ้น แล้วถอดฝาครอบออกอย่างเบามือ

ขั้นตอนที่ 7: ยึด Base Housing ให้แน่น
นำ Screws for Base Housing จำนวน 10 ตัวจาก accessory box แล้วใช้ประแจ H2.0 ขันเข้าตำแหน่งที่กำหนดให้ครบทุกจุด

ข้อควรระวัง: น็อตล็อกฐานต้องขันให้แน่นทุกตัว หากขันไม่สุด เครื่องอาจเคลื่อนที่สะดุด แกน Y อาจมีการรบกวนจนเกิด Step Loss หรือ Motion ผิดปกติได้ หากภายหลังพบอาการเหล่านี้ ให้ย้อนกลับมาตรวจขั้นตอนนี้ก่อน
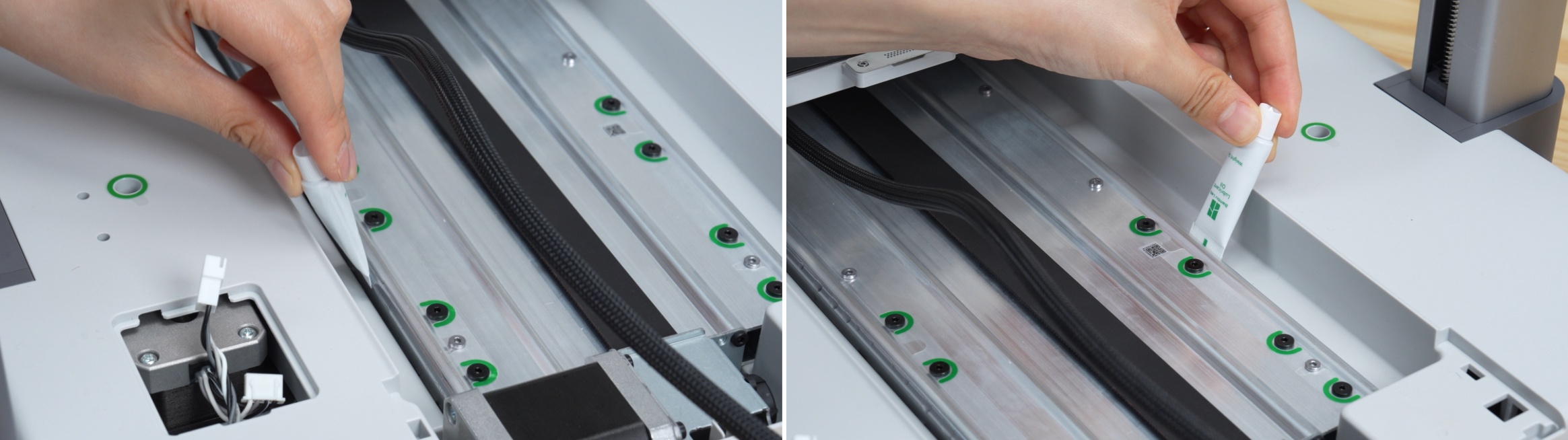
ขั้นตอนที่ 8: หล่อลื่นรางแกน Y
นำน้ำมันหล่อลื่นออกจาก accessory box แล้วหล่อลื่นเฉพาะบริเวณแกนเหล็กของราง Y ตามตำแหน่งที่แสดงในภาพ
ข้อควรระวัง: ให้ใช้น้ำมันหล่อลื่นเท่านั้น ไม่ควรใช้จาระบีหรือ Lubricant Grease กับตำแหน่งนี้ เพราะอาจทำให้เครื่องเสียหายหรือเคลื่อนที่ผิดปกติได้
เตรียมน้ำมันหล่อลื่น

หยดน้ำมันเล็กน้อยที่ขอบด้านบนของรางแกน Y ด้านหลัง

ใช้ปลายหลอดน้ำมันเกลี่ยให้ทั่วผิวโค้งของแกนเหล็ก
ดัน Heatbed ไปด้านหลังสุด

หยดน้ำมันบริเวณแกนเหล็กด้านหน้า

เกลี่ยน้ำมันให้เคลือบผิวโค้งของรางด้านหน้าอย่างสม่ำเสมอ

เลื่อน Heatbed ไป-กลับหลายครั้งเพื่อกระจายน้ำมัน

ขั้นตอนที่ 9: ใส่ Y-Axis Top Cover กลับเข้าที่
ดัน Heatbed มาไว้บริเวณกลางเครื่อง

จัดเขี้ยวล็อกด้านหน้าของ Y-Axis Top Cover ให้ตรงกับร่องติดตั้ง แล้วเลื่อนเข้าที่อย่างนุ่มนวล

กดด้านท้ายของ Y-Axis Top Cover ลงให้เขี้ยวล็อกเข้าที่ครบถ้วน

ขั้นตอนที่ 10: ต่อสาย Z Motor
ดัน Heatbed ไปทางด้านจอ ใช้ประแจ Allen งัดเทปยึดสายอย่างระมัดระวัง แล้วดึงออกด้วยมือ

ต่อสาย Z Motor ให้แน่น

จัดสายกลับเข้าตำแหน่งโดยไม่ให้บังพื้นที่ติดตั้ง

นำ Z Motor Cover จาก accessory box มาครอบในทิศทางที่ถูกต้อง

ขั้นตอนที่ 11: ต่อ Integrated Cable
จัด Integrated Cable ให้ตรง ไม่บิด ไม่ไขว้ และไม่ถูกกดทับ

ตรวจทิศทางหัวต่อ โดยให้ตัวอักษร A หงายขึ้น แล้วเสียบ Integrated Cable เข้าด้านหลังกล่อง X Motor
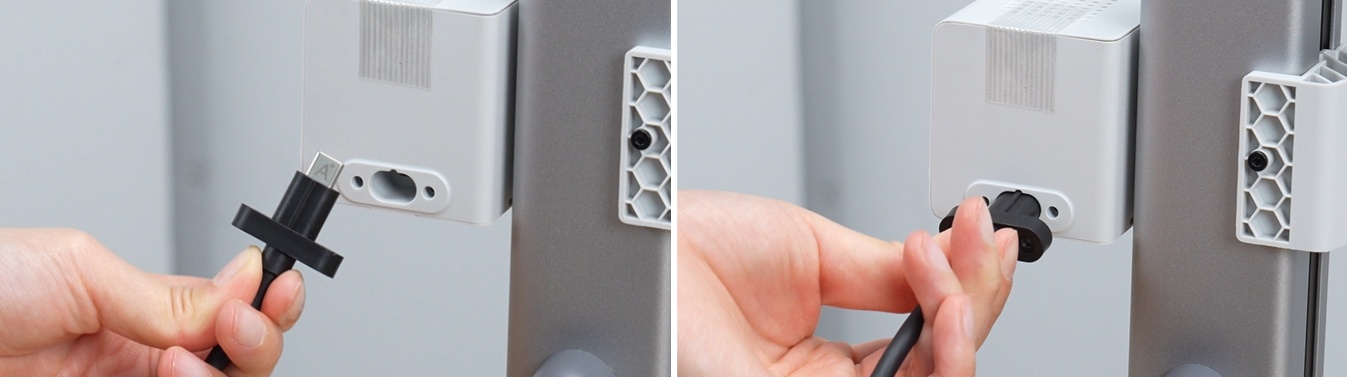
ขัน Screws for Integrated Cable จำนวน 2 ตัวเพื่อยึดสายให้แน่น

ขั้นตอนที่ 12: ถอดตัวล็อกแกน Z
ใช้ประแจ H2.0 คลายน็อต 4 ตัวของตัวล็อกแกน Z

ถอดตัวล็อกแกน Z ทั้ง 2 ชิ้นออกจากเครื่อง
ขั้นตอนที่ 13: ติดตั้ง Purge Wiper
เลื่อน Toolhead มาไว้ตรงกลางรางก่อนเริ่มติดตั้ง Purge Wiper เพื่อให้มีพื้นที่เสียบชิ้นส่วนและจัดสายได้สะดวก
ข้อควรระวัง: หากไม่ได้เลื่อน Toolhead มาไว้กลางเครื่องก่อนติดตั้ง Purge Wiper ตัว Purge Wiper อาจชนหรือติดกับ Toolhead ทำให้เกิด error หรือเสียงผิดปกติระหว่างใช้งาน
เลื่อน Toolhead มาไว้กลาง Linear Rail

นำ Purge Wiper ออกจาก accessory box แล้วเปิดฝาหลัง

ประคองสายที่ปลายแกน X ไม่ให้บังร่อง จากนั้นเลื่อน Purge Wiper เข้า slot
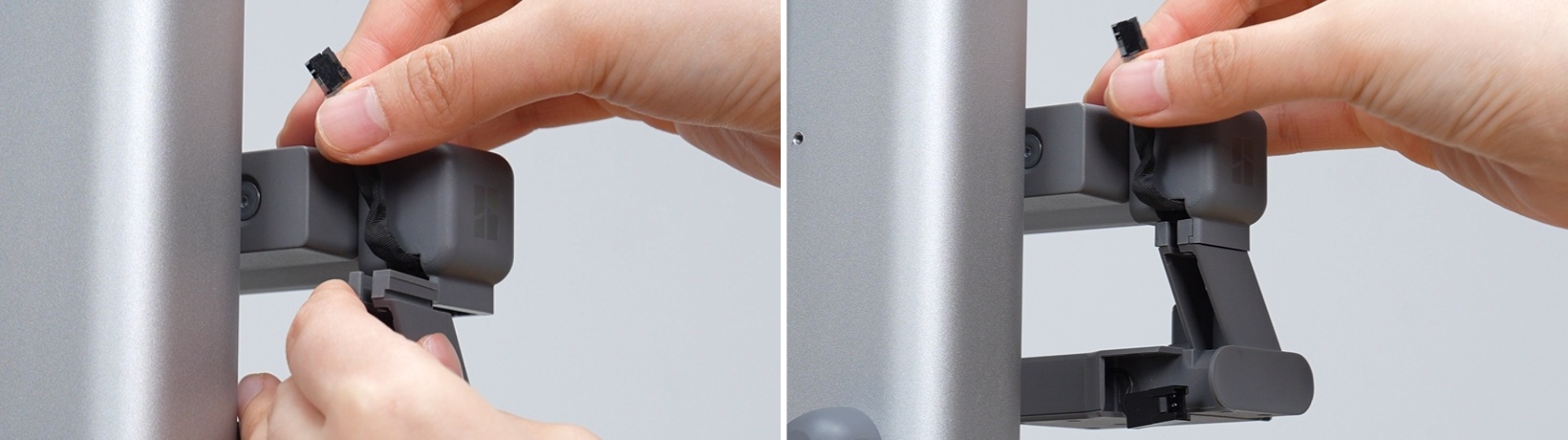
ขัน Screw for Purge Wiper จำนวน 1 ตัวด้วยประแจ H2.0

เสียบสายเชื่อมต่อเข้ากับพอร์ต
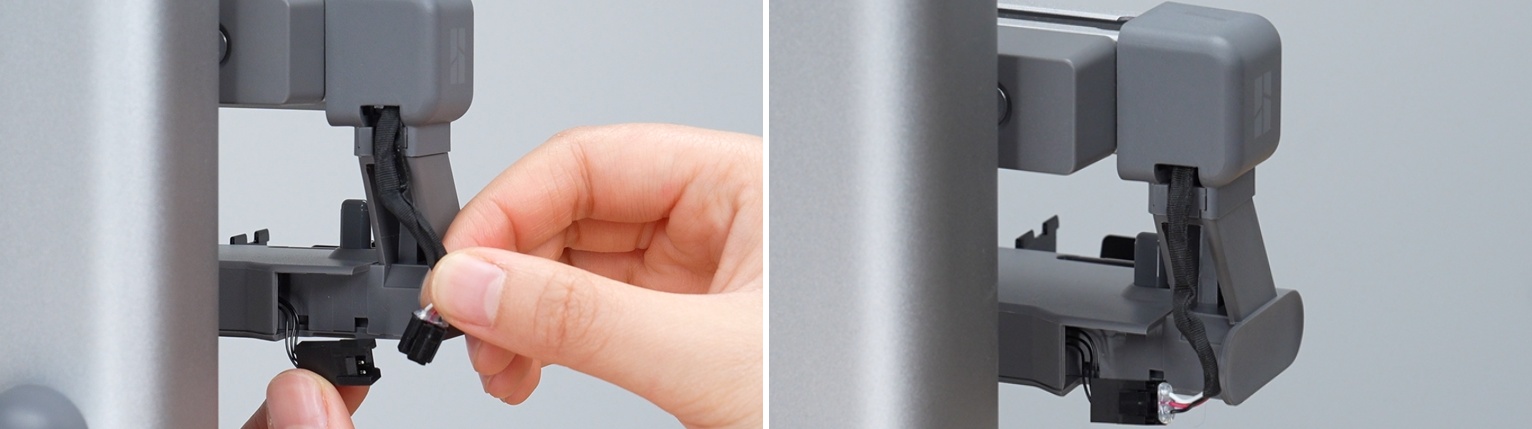
จัดสายเข้าช่อง cable channel และให้หัวต่ออยู่ด้านซ้าย
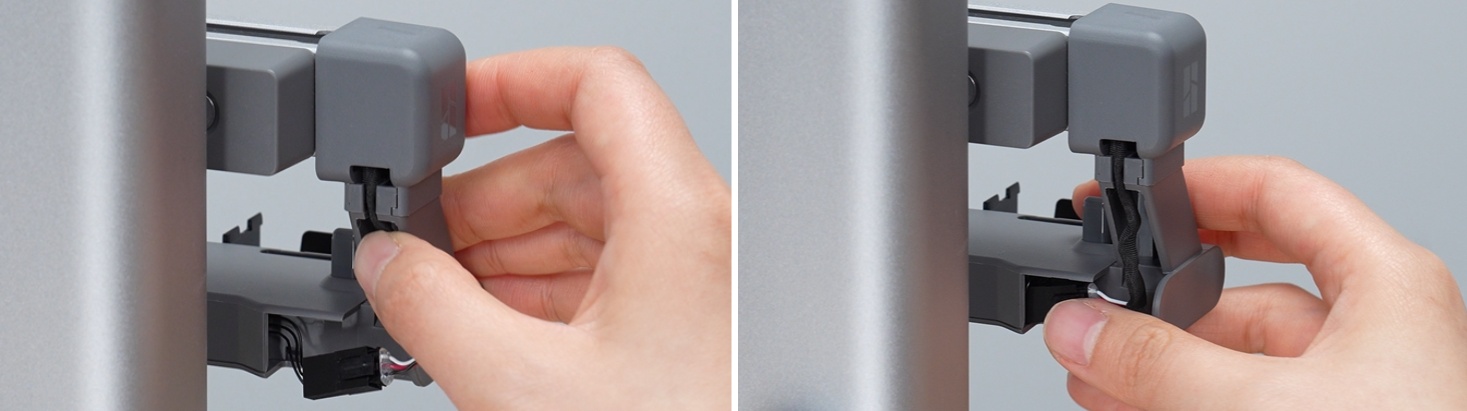
ตรวจให้สายอยู่ในตำแหน่งตามภาพ แล้วใส่ฝาหลัง Purge Wiper กลับเข้าที่

ขั้นตอนที่ 14: กาง Touchscreen
กาง Touchscreen ออกมาในตำแหน่งใช้งาน โดยไม่บิดหรือดึงสายหน้าจอ

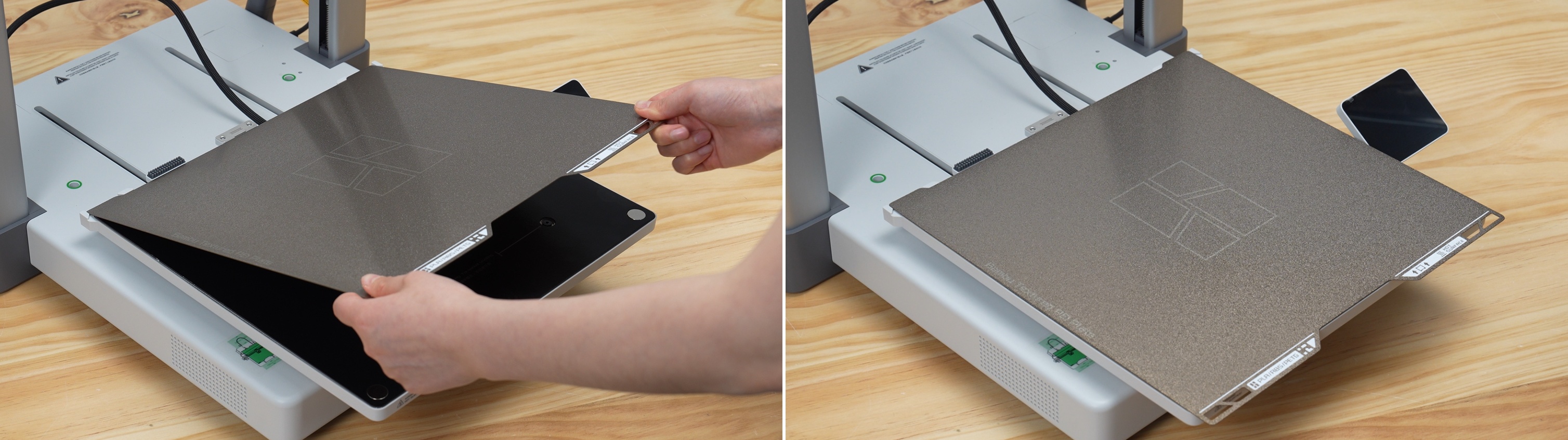
ขั้นตอนที่ 15: ติดตั้ง Build Plate
จับ Build Plate ด้วยสองมือ จัดขอบแผ่นให้ตรงกับ Heatbed แล้ววางลงเบา ๆ ให้แนบกับพื้นผิวแม่เหล็ก
ขั้นตอนที่ 16: ลอกฟิล์มและแกะเทปป้องกัน
ลอกฟิล์มป้องกันออกจากหน้าจอและ MicroSD Card

แกะเทปบริเวณ Toolhead

แกะเทปด้านหน้าและด้านหลังของกล่อง X Motor

เปิด Privacy Cover

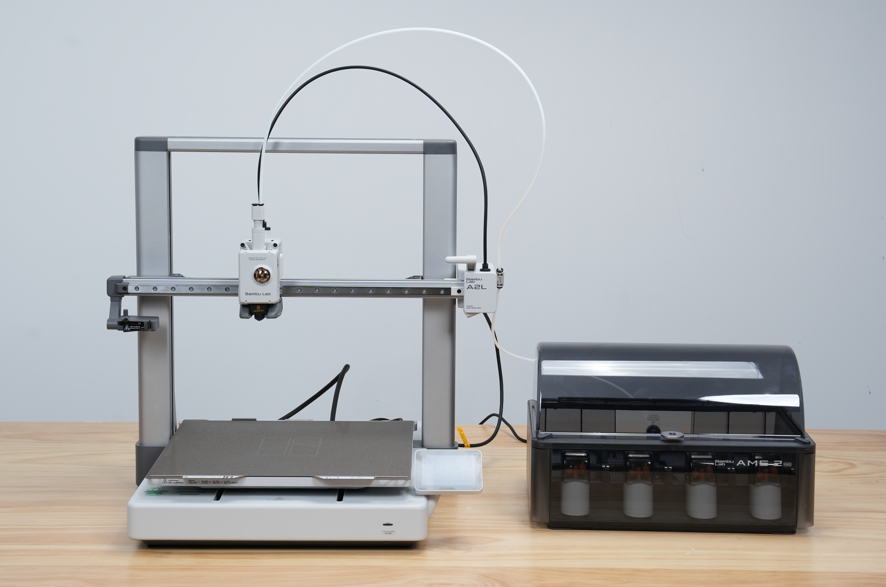
ขั้นตอนที่ 17: ติดตั้ง External Spool Holder และต่อท่อ PTFE
นำ External Spool Holder ออกมาติดตั้งเข้ากับ Frame
นำท่อ PTFE มาต่อ โดยต่อปลายด้านหนึ่งเข้ากับ tube connector บน bracket และต่ออีกด้านเข้ากับช่องรับเส้นใดก็ได้บน Toolhead

ขั้นตอนที่ 18: เปิดเครื่อง
เสียบ Power Cable เข้ากับตัวเครื่องและแหล่งจ่ายไฟ จากนั้นเปิดสวิตช์เครื่อง

ขั้นตอนที่ 19: ทำ Initial Calibration ตามหน้าจอ
ตรวจให้แน่ใจว่า Build Plate ถูกติดตั้งอยู่บน Heatbed แล้ว หลังเปิดเครื่องให้ทำตามคำแนะนำบนหน้าจอเพื่อดำเนินการ initialization และ calibration ของเครื่อง

คำแนะนำจากช่าง: หากข้ามขั้นตอนเชื่อมต่อเครือข่ายหรือ bind เครื่องกับ Bambu Handy ระหว่างแกะกล่อง สามารถกลับไปตั้งค่าเครือข่ายและ bind เครื่องได้ภายหลังจากเครื่อง calibration เสร็จแล้ว
ภาคผนวก: การใช้ PTFE Tube Coupler เมื่อต้องเชื่อมต่อ AMS รุ่นอื่น
หากต้องการเชื่อมต่อ A2L กับ AMS, AMS 2 Pro หรือ AMS HT สามารถใช้ PTFE Tube Coupler เพื่อเชื่อมต่อระบบท่อส่งเส้นได้โดยตรง รายละเอียดการต่อควรอ้างอิงคู่มือ A2L AMS Connection Guide เพิ่มเติมก่อนใช้งานจริง
สรุปหลังประกอบเสร็จ
เมื่อทำครบทุกขั้นตอนแล้ว ควรตรวจซ้ำ 4 จุดก่อนใช้งานจริง ได้แก่ น็อตยึด Base Housing ทั้ง 10 ตัว, สาย Integrated Cable และ Z Motor, ตำแหน่ง Purge Wiper และการวาง Build Plate บน Heatbed การตรวจซ้ำก่อน calibration จะช่วยลดปัญหาเครื่องเคลื่อนที่ผิดปกติหรือเกิด error ในรอบเริ่มต้น
แหล่งอ้างอิง
เรียบเรียงจากคู่มือ Bambu Lab Wiki: Unboxing Guide for the A2L และปรับภาษา/คำอธิบายให้เหมาะกับรูปแบบ Knowledge Base ของ Siamreprap